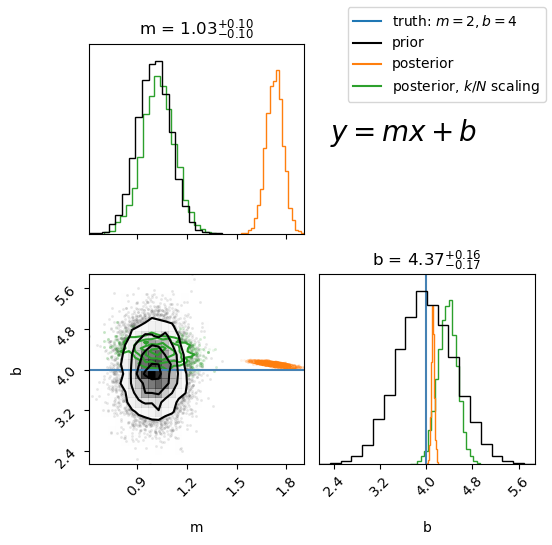
Large N implies overconfidence? Do we need to re-scale the Likelihood?#
from collections import OrderedDict
import corner
import numpy as np
from matplotlib import pyplot as plt
from scipy import stats
from scipy.stats import norm
import rxmc
Using database version X4-2025-12-31 located in: /mnt/home/beyerkyl/x4db/unpack_exfor-2025/X4-2025-12-31
true_params = OrderedDict(
[
("m", 2),
("b", 4),
]
)
rng = np.random.default_rng(42)
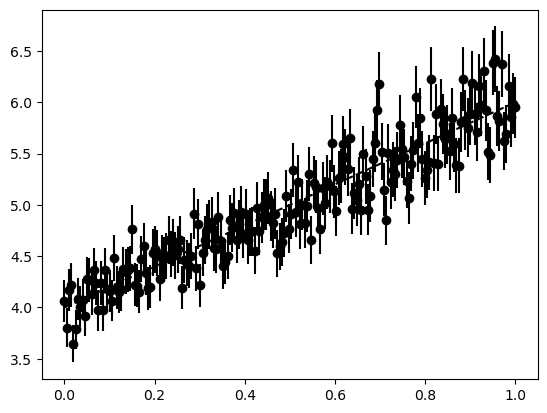
noise = 0.05
N = 200
# x_data = np.sort(np.random.rand(N))
x_data = np.linspace(0, 1, N)
y_true = true_params["m"] * x_data + true_params["b"]
y_err = np.array([rng.normal(0, noise * y) for y in y_true])
y_data = y_true + y_err
reported_stat_err = noise * y_data
class LinearModel(rxmc.physical_model.PhysicalModel):
def __init__(self):
params = [
rxmc.params.Parameter("m", float, "no-units"),
rxmc.params.Parameter("b", float, "y-units"),
]
super().__init__(params)
def evaluate(self, observation, m, b):
return self.y(observation.x, m, b)
def y(self, x, m, b):
# useful to have a function hat takes in an array-like x
# rather than an Observation, e.g. for plotting
return m * x + b
prior_mean = OrderedDict(
[
("m", 1),
("b", 4),
]
)
prior_std_dev = OrderedDict(
[
("m", 0.1),
("b", 0.5),
]
)
covariance = np.diag(list(prior_std_dev.values())) ** 2
mean = np.array(list(prior_mean.values()))
prior_distribution = stats.multivariate_normal(mean, covariance)
mean
array([1, 4])
my_model = LinearModel()
observation = rxmc.observation.Observation(
x=x_data,
y=y_data,
y_stat_err=y_true * noise,
)
plt.errorbar(
x_data,
y_data,
noise * y_data,
color="k",
marker="o",
linestyle="none",
label="experiment",
)
plt.plot(x_data, y_true, "k--", label="truth")
[<matplotlib.lines.Line2D at 0x14ec0456ee90>]
likelihood = rxmc.likelihood_model.LikelihoodModel()
evidence = rxmc.evidence.Evidence(
[
rxmc.constraint.Constraint(
[observation],
my_model,
likelihood,
)
],
)
evidence_scaled = rxmc.evidence.Evidence(
[
rxmc.constraint.Constraint(
[observation],
my_model,
likelihood,
)
],
weights=np.array([2 / N]),
)
def proposal_distribution(x, rng):
return stats.multivariate_normal.rvs(
mean=x, cov=prior_distribution.cov / 100, random_state=rng
)
walker_scaled = rxmc.walker.Walker(
rxmc.param_sampling.BatchedAdaptiveMetropolisSampler(
params=my_model.params,
starting_location=prior_distribution.mean,
prior=prior_distribution,
initial_proposal_cov=prior_distribution.cov / 100,
),
evidence_scaled,
)
walker = rxmc.walker.Walker(
rxmc.param_sampling.BatchedAdaptiveMetropolisSampler(
params=my_model.params,
starting_location=prior_distribution.mean,
prior=prior_distribution,
initial_proposal_cov=prior_distribution.cov / 100,
),
evidence,
)
%%time
walker_scaled.walk(n_steps=10000, burnin=1000, batch_size=500)
Burn-in batch 1/2 completed, 500 steps.
Burn-in batch 2/2 completed, 500 steps.
Batch: 1/20 completed, 500 steps.
Model parameter acceptance fraction: 0.390
Batch: 2/20 completed, 500 steps.
Model parameter acceptance fraction: 0.364
Batch: 3/20 completed, 500 steps.
Model parameter acceptance fraction: 0.336
Batch: 4/20 completed, 500 steps.
Model parameter acceptance fraction: 0.360
Batch: 5/20 completed, 500 steps.
Model parameter acceptance fraction: 0.394
Batch: 6/20 completed, 500 steps.
Model parameter acceptance fraction: 0.386
Batch: 7/20 completed, 500 steps.
Model parameter acceptance fraction: 0.390
Batch: 8/20 completed, 500 steps.
Model parameter acceptance fraction: 0.358
Batch: 9/20 completed, 500 steps.
Model parameter acceptance fraction: 0.342
Batch: 10/20 completed, 500 steps.
Model parameter acceptance fraction: 0.384
Batch: 11/20 completed, 500 steps.
Model parameter acceptance fraction: 0.338
Batch: 12/20 completed, 500 steps.
Model parameter acceptance fraction: 0.370
Batch: 13/20 completed, 500 steps.
Model parameter acceptance fraction: 0.368
Batch: 14/20 completed, 500 steps.
Model parameter acceptance fraction: 0.352
Batch: 15/20 completed, 500 steps.
Model parameter acceptance fraction: 0.362
Batch: 16/20 completed, 500 steps.
Model parameter acceptance fraction: 0.300
Batch: 17/20 completed, 500 steps.
Model parameter acceptance fraction: 0.396
Batch: 18/20 completed, 500 steps.
Model parameter acceptance fraction: 0.342
Batch: 19/20 completed, 500 steps.
Model parameter acceptance fraction: 0.340
Batch: 20/20 completed, 500 steps.
Model parameter acceptance fraction: 0.366
CPU times: user 37.6 s, sys: 2.6 s, total: 40.2 s
Wall time: 12.5 s
%%time
walker.walk(n_steps=10000, burnin=1000, batch_size=500)
Burn-in batch 1/2 completed, 500 steps.
Burn-in batch 2/2 completed, 500 steps.
Batch: 1/20 completed, 500 steps.
Model parameter acceptance fraction: 0.328
Batch: 2/20 completed, 500 steps.
Model parameter acceptance fraction: 0.312
Batch: 3/20 completed, 500 steps.
Model parameter acceptance fraction: 0.332
Batch: 4/20 completed, 500 steps.
Model parameter acceptance fraction: 0.394
Batch: 5/20 completed, 500 steps.
Model parameter acceptance fraction: 0.376
Batch: 6/20 completed, 500 steps.
Model parameter acceptance fraction: 0.444
Batch: 7/20 completed, 500 steps.
Model parameter acceptance fraction: 0.378
Batch: 8/20 completed, 500 steps.
Model parameter acceptance fraction: 0.362
Batch: 9/20 completed, 500 steps.
Model parameter acceptance fraction: 0.326
Batch: 10/20 completed, 500 steps.
Model parameter acceptance fraction: 0.380
Batch: 11/20 completed, 500 steps.
Model parameter acceptance fraction: 0.376
Batch: 12/20 completed, 500 steps.
Model parameter acceptance fraction: 0.326
Batch: 13/20 completed, 500 steps.
Model parameter acceptance fraction: 0.406
Batch: 14/20 completed, 500 steps.
Model parameter acceptance fraction: 0.378
Batch: 15/20 completed, 500 steps.
Model parameter acceptance fraction: 0.318
Batch: 16/20 completed, 500 steps.
Model parameter acceptance fraction: 0.386
Batch: 17/20 completed, 500 steps.
Model parameter acceptance fraction: 0.332
Batch: 18/20 completed, 500 steps.
Model parameter acceptance fraction: 0.310
Batch: 19/20 completed, 500 steps.
Model parameter acceptance fraction: 0.400
Batch: 20/20 completed, 500 steps.
Model parameter acceptance fraction: 0.382
CPU times: user 34.8 s, sys: 2.35 s, total: 37.2 s
Wall time: 12.4 s
fig = corner.corner(
walker_scaled.model_sampler.chain,
color="tab:green",
truths=[true_params["m"], true_params["b"]],
labels=["m", "b"],
show_titles=True,
)
_ = corner.corner(
walker.model_sampler.chain,
color="tab:orange",
fig=fig,
)
_ = corner.corner(
prior_distribution.rvs(10000),
fig=fig,
)
plt.plot([], [], color="tab:blue", label="truth: $m=2, b=4$")
plt.plot([], [], color="k", label="prior")
plt.plot([], [], color="tab:orange", label="posterior")
plt.plot([], [], color="tab:green", label="posterior, $k/N$ scaling")
fig.text(0.6, 0.75, "$y=mx+b$", fontsize=20)
fig.legend(loc="upper right")
plt.tight_layout()
# plt.savefig("corner_oc.pdf")
plt.savefig("corner_oc_badprior.pdf")
def predictive_posterior(
walker, model, x, x_data, y_exp, y_err, percentile_bounds, added_noise=0.0
):
n_posterior_samples = walker.model_sampler.chain.shape[0]
y = np.zeros((n_posterior_samples, len(x)))
for i in range(n_posterior_samples):
sample = walker.model_sampler.chain[i, :]
y[i, :] = np.random.normal(loc=model.y(x, *sample), scale=added_noise)
percentiles = np.percentile(y, percentile_bounds, axis=0)
return percentiles
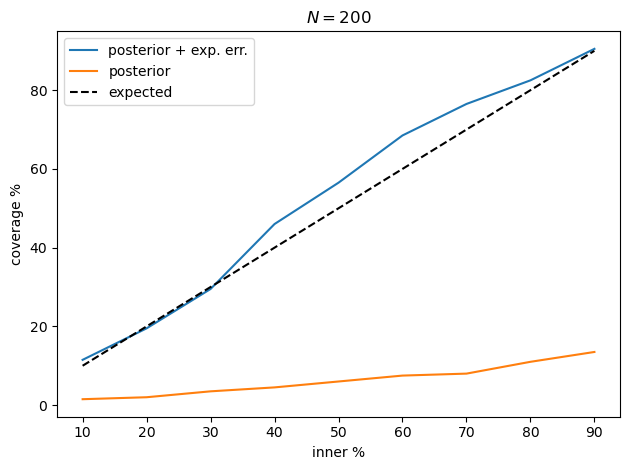
Empirical coverage#
spacing = 10
inner_pctls = np.arange(spacing, 100, spacing)
inner_pctls
array([10, 20, 30, 40, 50, 60, 70, 80, 90])
pb = np.hstack([50 - np.flip(inner_pctls) / 2, 50 + inner_pctls / 2])
pb
array([ 5., 10., 15., 20., 25., 30., 35., 40., 45., 55., 60., 65., 70.,
75., 80., 85., 90., 95.])
lower_bounds = np.flip(pb[: inner_pctls.shape[0]])
upper_bounds = pb[inner_pctls.shape[0] :]
for l, u in zip(lower_bounds, upper_bounds):
print(l, u)
45.0 55.0
40.0 60.0
35.0 65.0
30.0 70.0
25.0 75.0
20.0 80.0
15.0 85.0
10.0 90.0
5.0 95.0
pctls_scaled = predictive_posterior(
walker_scaled,
my_model,
x_data,
x_data,
y_data,
noise,
percentile_bounds=pb,
added_noise=reported_stat_err,
)
pctls = predictive_posterior(
walker,
my_model,
x_data,
x_data,
y_data,
noise,
percentile_bounds=pb,
added_noise=reported_stat_err,
)
pctls_unbroadened = predictive_posterior(
walker,
my_model,
x_data,
x_data,
y_data,
noise,
percentile_bounds=pb,
added_noise=0,
)
lower = np.flip(pctls[: inner_pctls.shape[0], :], axis=0)
upper = pctls[inner_pctls.shape[0] :, :]
lower_l = np.flip(pctls_unbroadened[: inner_pctls.shape[0], :], axis=0)
upper_l = pctls_unbroadened[inner_pctls.shape[0] :, :]
lower_s = np.flip(pctls_scaled[: inner_pctls.shape[0], :], axis=0)
upper_s = pctls_scaled[inner_pctls.shape[0] :, :]
# plt.fill_between(x_data, lower_bounds[-2,:], upper_bounds[-2,:], alpha=0.5)
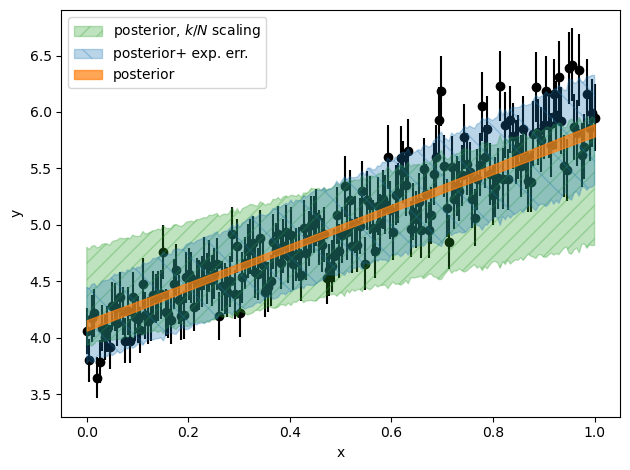
plt.errorbar(
x_data, y_data, reported_stat_err, linestyle="none", marker="o", color="k", zorder=0
)
plt.fill_between(
x_data,
lower_s[-1, :],
upper_s[-1, :],
alpha=0.3,
color="tab:green",
label="posterior, $k/N$ scaling",
hatch="//",
)
plt.fill_between(
x_data,
lower[-1, :],
upper[-1, :],
alpha=0.3,
color="tab:blue",
label="posterior+ exp. err.",
hatch="\\",
)
plt.fill_between(
x_data,
lower_l[-1, :],
upper_l[-1, :],
alpha=0.7,
color="tab:orange",
label="posterior",
)
plt.xlabel("x")
plt.ylabel("y")
plt.legend()
plt.tight_layout()
# plt.savefig(f"ci_scaled_vs_non.pdf")
plt.savefig("ci_scaled_vs_non_badprior.pdf")
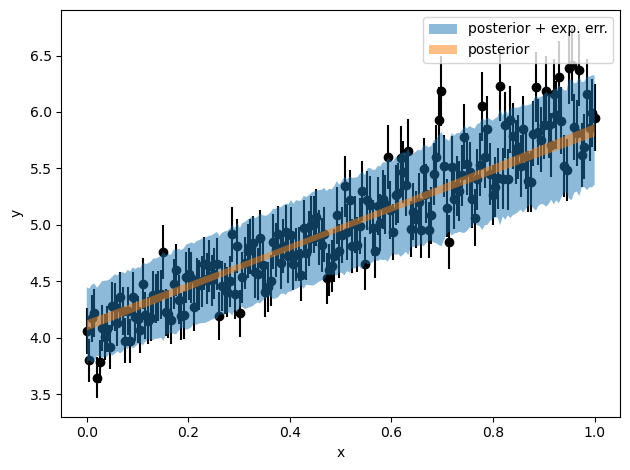
# plt.fill_between(x_data, lower_bounds[-2,:], upper_bounds[-2,:], alpha=0.5)
plt.errorbar(
x_data, y_data, reported_stat_err, linestyle="none", marker="o", color="k", zorder=0
)
plt.fill_between(
x_data, lower[-1, :], upper[-1, :], alpha=0.5, label="posterior + exp. err."
)
plt.fill_between(x_data, lower_l[-1, :], upper_l[-1, :], alpha=0.5, label="posterior")
plt.xlabel("x")
plt.ylabel("y")
plt.legend()
plt.tight_layout()
plt.savefig(f"n{N}_ci.pdf")
def coverage_counted(y, err, lower, upper):
coverage_integrated = np.zeros(len(lower))
for i, (l, u) in enumerate(zip(lower, upper)):
coverage_integrated[i] = np.mean(np.logical_and(y >= l, y < u))
return coverage_integrated
def coverage(y, err, lower, upper):
coverage_integrated = np.zeros(len(lower))
for i, (l, u) in enumerate(zip(lower, upper)):
coverage_integrated[i] = np.mean(
norm.cdf((u - y) / err) - norm.cdf((l - y) / err)
)
return coverage_integrated
# plt.plot(inner_pctls, coverage_sum * 100, label="sum")
# cov = coverage_counted(y_data, reported_stat_err, lower_bounds, upper_bounds)
cov = coverage_counted(y_data, reported_stat_err, lower, upper)
plt.plot(
inner_pctls,
cov * 100,
label="posterior + exp. err.",
)
cov = coverage_counted(y_data, reported_stat_err, lower_l, upper_l)
# cov = coverage_counted(y_data, reported_stat_err, lower_bounds, upper_bounds)
plt.plot(
inner_pctls,
cov * 100,
label="posterior",
)
plt.plot(inner_pctls, inner_pctls, "k--", label="expected")
plt.legend()
plt.xlabel("inner %")
plt.ylabel("coverage %")
plt.title(f"$N = {N}$")
plt.tight_layout()
plt.savefig(f"n{N}_ec.pdf")